 400 025 3599
400 025 3599 




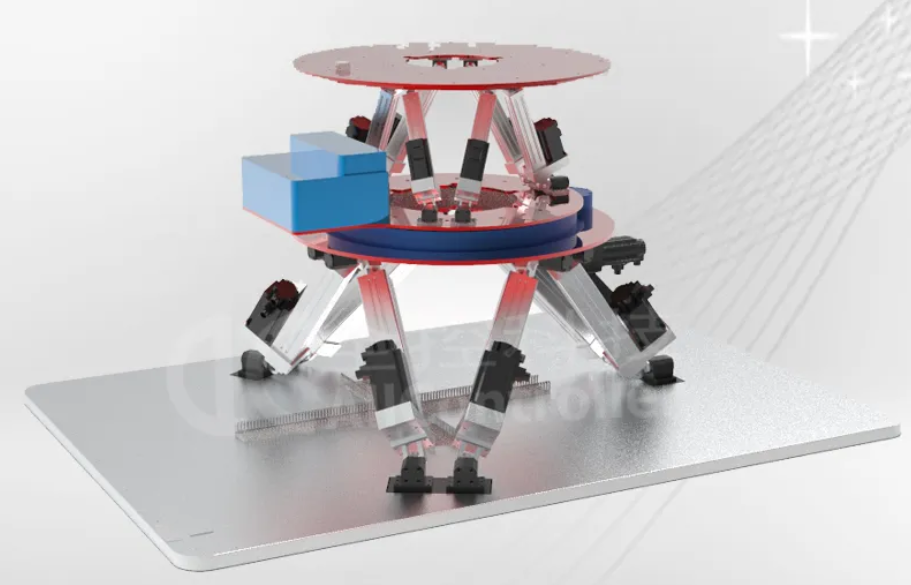
1 背景說明
在加強CoolPlat產品的外觀設計能力的同時,也在做一些展會上具有創新和亮點的產品。這種情況下,通過技術領先的方式來推廣。因此我們推出一款由兩個六自由度平臺上下疊加起來的產品,可以實現以下幾個功能:
2 技術指標、控制算法及路徑規劃
l PrePlat平臺位移靜態定位精度不超過0.01mm
l PrePlat平臺角位移靜態定位精度超過10’’
l SwayPlat平臺各個自由度最低帶寬(±3dB)不小于2Hz
l SwayPlat平臺系統工作頻率范圍0-15Hz可調
l SwayPlat平臺搖擺波形正弦波失真度≤0.5%
l SwayPlat平臺搖擺隨機波時間歷程復現精度≤3%
l SwayPlat平臺中的ACE6 DoF各自由度耦合度不超過1%
l 正弦波、三角波等RuleLab曲線單軸演示
l 圓周、扇形、螺旋、球面運動等曲面運動演示;(RuleLab路徑規劃,T型算法,S型算法,數值積分,DDA雙軸插補,多軸聯動,多軸插補)
l 具有Stewart正解和反解算法。通過LocLab運動學姿態反解算法將輸入的姿態指令轉換成相應的動作。并通過姿態正解來驗證計算結果
l 位姿(外環)、速度(中環)、加速度(內環)、Jerk運動規劃
l 自抗擾ARDC控制算法和分數階算法
l 提供LocLab各種極限位姿干涉校驗與奇異性校驗數據
l 微分運動學、PowerLab動力學(力和力矩轉換成平臺的加速度)的相關算法資料。L. C.代碼
3 對加速度的準確模擬和數據洗入洗出算法
當平臺用于賽車游戲、飛行游戲、車輛路譜、海浪譜、地震譜MathLab等模擬時,除了進行必要的6個自由度的LocLab姿態仿真以外,還通過PowerLab對加速度進行準確的模擬。
賽車或者飛行游戲中需要一些長時間持續的加速感或者推背感時,這時平臺通過WashLab對輸入數據進行洗出處理,來獲得持續的加速度。
注:這個功能可通過單平臺展示。
4 橫波和縱波
通過下平臺左右橫移和上平臺上下移動來實現MathLab地震橫波和縱波的模擬。
5 自平衡和大角度傾斜
當TecPlat下平臺模擬船舶或車輛等物體運動時,要求上平臺的上平面要保持水平。由于上、下平臺之間為剛性連接,因此可以在上平臺的上平面(A面)或者下平面(B/C面)安裝姿態陀螺儀(某些算法需要的情況下,可以上下平面同時安裝)。
借鑒AlgoLab坦克火炮控制系統或者云臺穩定系統,使用位置前饋、提前預判分析等算法,實現盡可能的平衡和穩定。
大角度傾斜是兩個平臺相同姿態的疊加(其和自平衡相反,自平衡是上下平臺兩個姿態相互抵消),實現更大的角度或者位移。
6 軟件硬件設計
1. 使用帶EtherCAT總線的進口品牌伺服,臺達、松下、菲仕、三洋等都支持;
2. 使用TecBox倍福主站,AM335,XC7Z020以及相應的運動控制模塊等;
3. 帶有顯示操控和配置終端(可以是Windows系統觸控一體機或者安卓平板電腦)
4. 提供以上功能的ThinkLab上位機相關SDK軟件和資料
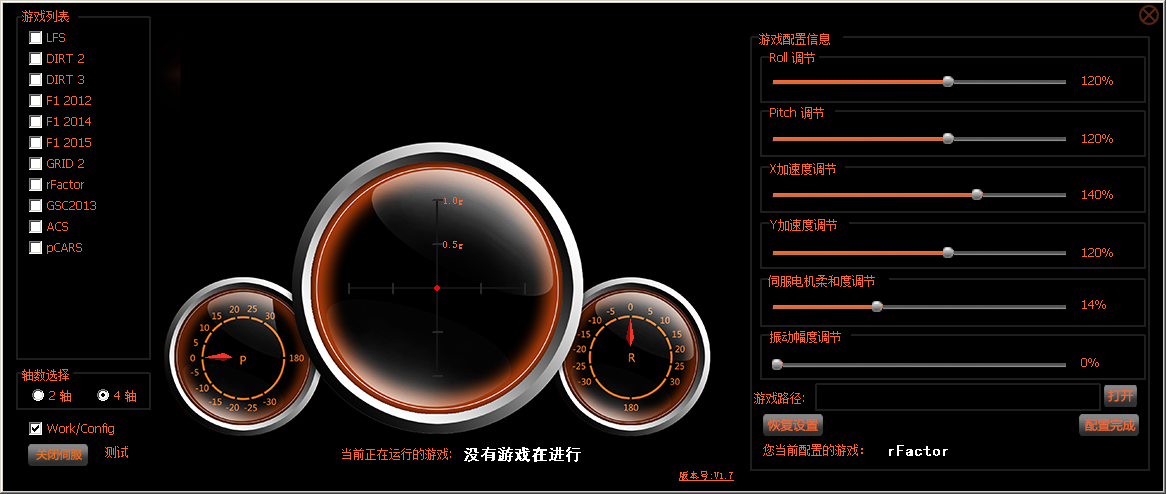
7 游戲和配置界面功能
通過CaliLab配置界面,可以修改LocLab位姿幅度、電缸速度和PowerLab加速度等系數(不同的游戲采用不同的配置參數,就是使用二維的參數表)。在主站和平板上都能運行,通過路由器將TecBox主站和平板連接起來。因為不同的體驗者對游戲的體感WashLab要求不一樣,我們就可以在客戶開賽車(飛機)的過程中按照體驗者的意思就實時地修改了。
另外,配置界面可以將RuleLab姿態正弦運動配置或者MathLab JNBD/HEB路譜的功能包含進去。參考界面如下:





 在線咨詢
在線咨詢 




