 400 025 3599
400 025 3599 




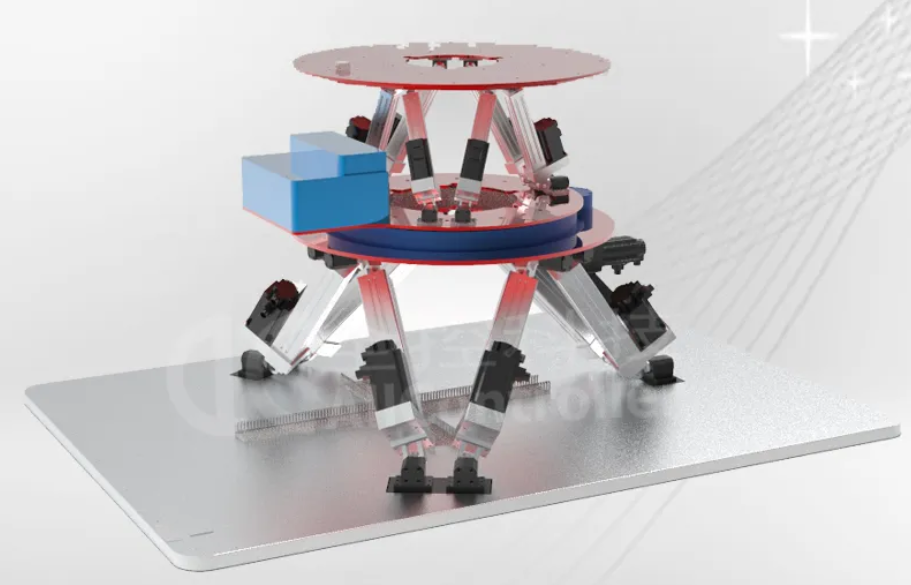
描述:
6自由度搖擺臺能夠根據用戶在一定范圍內的設置提供位置模擬、正弦波模擬、單自由度運動、多自由度復合運動、實現道路波譜過程、隨機波再現、道路頻譜、波譜、航空頻譜復制等功能。
技術規格:
有效載荷能力:200Kg
被測設備的安裝尺寸:φ400mm×400mm
表重量:約300Kg
工作臺表面尺寸:Ø1000mm
工作臺表面平整度:0.01mm
臺面打漿:0.02mm
移動范圍:螺距:±30°;起伏搖擺:±0.3m;
滾動旋轉:±30°;浪涌擺動:±0.3m;
偏航旋轉:±30°;垂直擺動:±0.2m
操作模式位置,擺動,模擬,預設波譜等
電氣控制柜:無(與工作臺集成)
計算機系統:工業控制計算機,接口,RS422,以太網(≥100Mbps)
安全預防措施:實時顯示系統狀態和安全保護狀態;提供命令的容錯檢查,以防止誤操作。
環境溫度:10℃~40℃
旋轉自由度精度:≤±3'
平移精度:≤±0.5mm
速率范圍:螺距:±20°;起伏搖擺:±0.3m;
輥旋轉:±20°;浪涌搖擺:±0.3m;
偏航旋轉:±20°;垂直擺動:±0.3m
最大加速度:螺距:±200°/ s2;起伏搖擺:±1g;
輥旋轉:±200°/ s2;浪涌搖擺:±1g;
偏航旋轉:±200°/ s2;垂直擺動:±1g
移動頻率范圍:0.01Hz~0.5Hz
驅動模式:交流電機驅動通過電動缸慢速驅動
6自由度搖擺臺功能設計
從控制角度看,六自由度運動平臺控制系統是一種電動伺服控制系統。要對其進行控制系統的總體設計,就必須先明確該系統的結構特性與工作原理,分析該系統應當包含的功能模塊。然后基于其功能需求,設計出整個系統所需的硬件模塊,畫出控制系統構成圖。而后對硬件部分和軟件部分分別進行設計和規劃,從而完成六自由度運動平臺控制系統的總體功能設計。
在實際控制過程中,主控單元需要頻繁地執行正反解、軌跡規劃求解等計算任務,且這些任務的計算量都比較大。此外,完備的控制系統還應包括人機交互、實時數據存儲等功能。
(1)位置控制:本文采用的控制方式主要是位置控制,當系統發出指令時,平臺的六個電動缸能夠按照指令,在系統限定范圍內進行伸縮運動,使運動平臺實現空間中六個自由度的目標運動。
(2)限位系統:當六自由度運動平臺的某個電動缸超過其運動范圍時,必須有限位系統檢測到這一問題,即刻將限位信號反饋至上位控制系統,系統發出警報,并執行相應保護措施。
(3)伺服警報:當六自由度運動平臺出現超載警報、電池警報、編碼器通信警報、振動檢測警報、散熱系統過熱警報等問題,系統會立即發出伺服警報,通過關閉伺服或指令脈沖禁止輸入等動作,將伺服電機關閉,及時地保護運動平臺。
(4)人機界面:控制系統需提供一個用戶使用的界面,操作簡明,方便控制,該界面應包含:控制方案選擇、參數初始化、基本指令輸入輸出等;平臺的位置姿態和電動缸伸縮量、速度等反饋參量及其運動曲線的同步顯示;伺服控制系統當前運行狀態等。
(5)急停裝置:當系統發出嚴重故障問題警報時,若不能利用控制按鍵及時停止平臺的運動,可以通過急停裝置,直接切斷整個系統電源,令平臺立即停止運動,避免運動平臺受到碰撞損壞等嚴重事故的發生。
(6)尋零、定位:在人機界面上需要有控制按鍵,可以令平臺自動回歸到零
點位置,或定位到空間限定范圍內的任一位置。
(7)自動檢測:系統通電之后,即刻開始檢測伺服控制系統各個構成模塊是否正常運行,并將檢測結果及時向上位機反饋報告。
關鍵詞: 六,自由度,搖擺,臺,功能,設計,描述,自由度,





 在線咨詢
在線咨詢 




