 400 025 3599
400 025 3599 




仿真模擬平臺按驅動方式分為三種:氣動平臺、液壓平臺、電動平臺;按自由度可分為三自由度平臺和六自由度平臺。
氣壓平臺
關鍵部件為氣壓缸、氣動電磁閥和空壓機。其具有結構簡單,耗電適中,價格低廉,無污染,動作響應速度快,工作可靠,便于維護,壽命長,適應溫度范圍廣。缺點是動力較小、噪聲大、平臺運行速度不均勻等。
液壓平臺
關鍵部件為液壓缸、液壓電磁閥(可分為開關閥和比例閥兩類)和液壓泵站。動力在三者中最大,適用于高載的情況。其價格中等、動作相對氣動平臺來說要緩和,噪音低;
電動平臺
關鍵部件為電動缸、減速機、伺服電機、伺服電機驅動器、運動控制卡等,一般有三自由度和六自由度兩種。動力大小僅次于液壓平臺。其具有響應速度快,靈敏度高,控制精確,結構簡單,可靠性高,噪音小,清潔衛生,便于維護。唯一缺點就是控制電路復雜,成本較高。

2.4 平臺驅動方式比較表
| 自由度種類 | 成本 | 噪音 | 動力大小 | 動作響應 | 環境適應性 | 耗電情況 | 其他 | |
| 氣壓平臺 | 三自由度、六自由度 | 便宜 | 噪音大 | 動力最小 | 動作響應快 | 溫度范圍廣,普通220V即可 | 中等 | 清潔衛生 |
| 液壓平臺 | 三自由度、六自由度 | 中等 | 噪音適中 | 最大 | 動作平穩,動作響應慢 | 不適合低溫環境,一般情況下需要380V供電 | 耗電 | 體積重量較大 |
| 電動平臺 | 三自由度、六自由度 | 昂貴 | 無 | 較大僅次于液動 | 動作響應快慢可調節、靈敏度高 | 溫度范圍廣,普通220V即可 | 省電 | 清潔衛生、靈巧、所用部件較少 |
在六自由度平臺的驅動系統中,電動驅動由于省去了能量的中間轉換環節,電動機直接產生力和力矩,運動過程確定性好,效率高,沒有復雜的管路系統具有高緊湊型,反應靈敏使用方便且成本較低。電動驅動方式具有以上較多的優點,所以該驅動方式在工業控制領域使用較為廣泛。
電動驅動控制系統中電動機的類型較多,包括步進電動機、交流伺服電動機、無刷直流伺服電動機等。交流伺服同步電動機是由正弦波信號控制,轉矩脈動小;同時電機的體積較小,慣量小,轉動平滑,而且電機快速響應性好、輸出轉矩大、反應靈敏、易于實現精確控制,所以本方案采用電動驅動方式,動力裝置選用交流伺服同步電機。
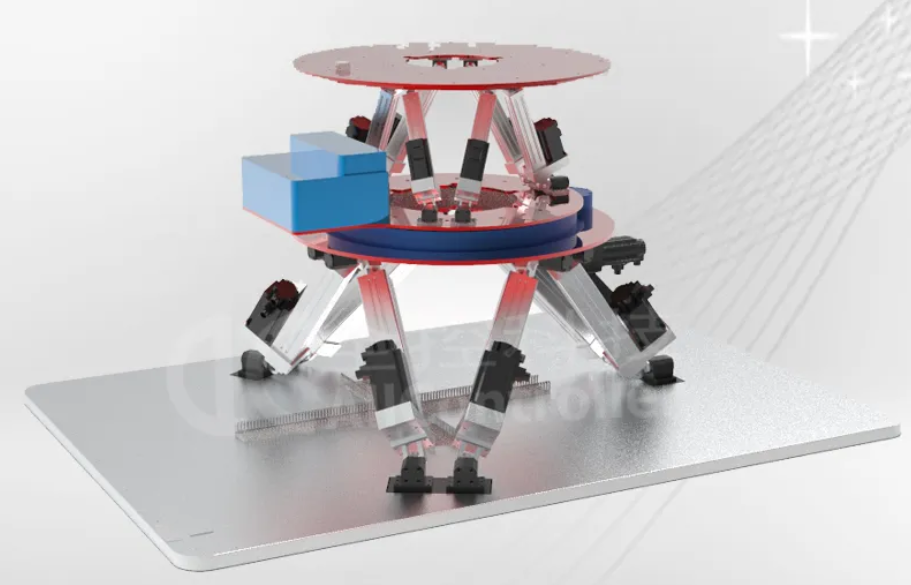
六自由度平臺詳細介紹
Stewart六自由度并聯平臺最初是由德國學者Stewart提出的,相比串聯機構其有以下優點:具有高剛度且結構比串聯式穩定;并聯機構定位準確,承載能力強,動態特性好;在實時計算控制時,并列式結構反解容易實現。Stewart六自由度并聯平臺從誕生以來其各種形式及結構被廣泛用于減振及精確定位領域。由于Stewart平臺結構的復雜性,國內外學者對其運動學和動力學特性進行了廣泛研究。Afzali-Far等人研究了對稱式結構的Stewart并聯平臺的阻尼減振控制,并設計和研究了Stewart的動力學特性。Zhao等人研究了并聯平臺的逆向運動學和剛體動力學特性,通過仿真平臺得到了平臺的速度、加速度、力矩等特性。
六自由度運動平臺系統由測試軟件部分系統、電氣控制系統、動力電源系統、運動平臺機械本體組成。運動平臺部分的組成結構示意圖如圖3.1所示。

系統組成框圖
軟件部分主要包括用戶界面程序、伺服算法程序、PID參數設置程序等。用戶界面程序采用VS C#編寫,界面友好,使用方便,可以接收用戶的鼠標和鍵盤輸入,設置工作的模式,運動的曲線類型等(正弦、連續、圓弧等),可以接收外部的指令,使平臺在跟隨狀態下運行。
電控部分的作用是接收控制系統輸出的指令數據,并將其傳輸給伺服驅動器,驅動器將信號放大后控制電機運動,進而帶動電動缸運動,并最終使平臺實現各種姿態。包括工控機、伺服驅動器、伺服電機及相關電器元件等。
機械部分用于支撐負載,包括上平臺、上連接鉸、下連接鉸、電動缸、支撐架、底座等。平臺由電動缸驅動,進行橫滾、偏航、俯仰三個姿態和X、Y、Z平移共六個自由度的運動。





 在線咨詢
在線咨詢 




