 400 025 3599
400 025 3599 




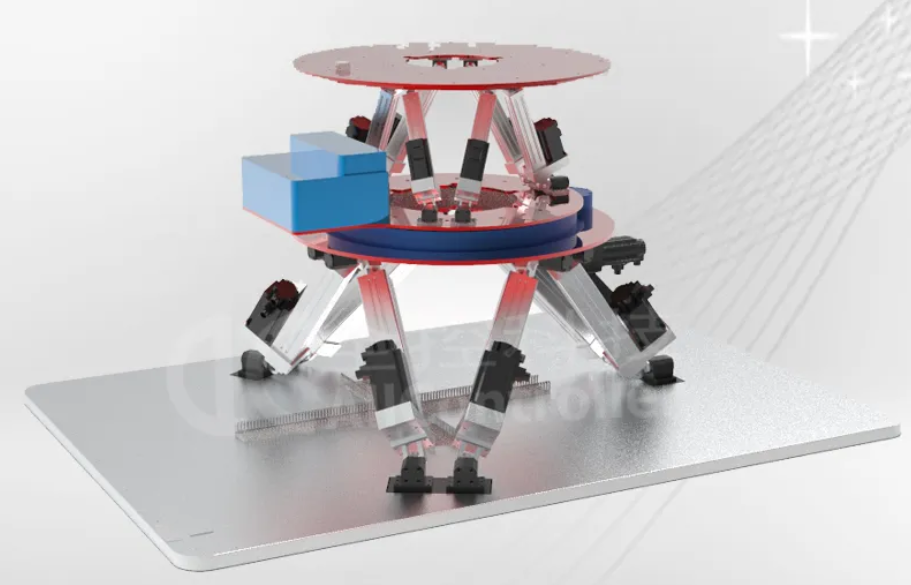
三自由度運(yùn)動(dòng)平臺(tái)能在空間三個(gè)自由度上做任一自由度的單自由度運(yùn)動(dòng),也能做任意幾個(gè)自由度的復(fù)合運(yùn)動(dòng)。由于采用全數(shù)字控制的伺服系統(tǒng)及伺服電動(dòng)缸作為平臺(tái)運(yùn)動(dòng)部分的執(zhí)行機(jī)構(gòu),因此,三自由度仿真平臺(tái)的運(yùn)動(dòng)軌跡及速度平滑連續(xù),既可實(shí)現(xiàn)高頻響的快速運(yùn)動(dòng),也可實(shí)現(xiàn)低速下的平穩(wěn)運(yùn)動(dòng)。
三自由度平臺(tái)是由三支伺服電動(dòng)缸、上下各三只萬向鉸鏈(虎克鉸)和上下兩個(gè)平臺(tái)組成。下平臺(tái)固定在基礎(chǔ)設(shè)施上,借助三支伺服電動(dòng)缸的伸縮運(yùn)動(dòng),完成平臺(tái)在空間三個(gè)自由度(X、Y、Z、α、β、γ)的運(yùn)動(dòng),從而可以模擬出各種空間運(yùn)動(dòng)姿態(tài)。
三自由度平臺(tái)原理
三自由度運(yùn)動(dòng)平臺(tái):系統(tǒng)原理總設(shè)計(jì)此圖為模擬機(jī)的系統(tǒng)流程圖,模擬機(jī)總控模塊位于軟件系統(tǒng)的頂層,總體管理圖形實(shí)時(shí)生成系統(tǒng)、訓(xùn)練考核系統(tǒng)、模擬駕駛專家系統(tǒng)的工作。數(shù)據(jù)采集與執(zhí)行系統(tǒng)作為模擬訓(xùn)練機(jī)的人機(jī)輸入接口和執(zhí)行輸出接口,模擬機(jī)總控模塊需要管理協(xié)調(diào)數(shù)據(jù)采集與系統(tǒng)。
三自由度運(yùn)動(dòng)平臺(tái)5三自由度運(yùn)動(dòng)平臺(tái)系統(tǒng)的計(jì)算機(jī)控制系統(tǒng)由單片微型計(jì)算機(jī)簡稱單片機(jī)各功能部件:中央處理器CPU、隨機(jī)存儲(chǔ)器RAM、只讀存儲(chǔ)器ROM、I/O接口電路、定時(shí)器/計(jì)數(shù)器以及串行通訊接口等部件制作在一塊集成芯片中,構(gòu)成一個(gè)完整的微型計(jì)算機(jī)。單片機(jī)控制系統(tǒng)硬件電路設(shè)計(jì)見圖單片機(jī)控制裝置的總體設(shè)計(jì)。三自由度運(yùn)動(dòng)平臺(tái)6MCS三自由度運(yùn)動(dòng)平臺(tái)51單片機(jī)的引腳描述及片外總線結(jié)構(gòu)單片機(jī)選擇的型號是8031值得強(qiáng)調(diào)的是,P3口的每一條引腳均可獨(dú)立定義為*動(dòng)能的輸入輸出或第二功能。MCS三自由度運(yùn)動(dòng)平臺(tái)51單片機(jī)的片外總線結(jié)構(gòu)電氣元件及型號:控制系統(tǒng)的器件組成有:單片機(jī)(型號:AT89C51)、A/D轉(zhuǎn)換芯片(型號:ADC0809),地址鎖存器(型號:74LS373),雙組驅(qū)動(dòng)器/接收器(型號:MAX232)以及開關(guān)等。
一般來說,離合器是在車輛起步和換擋的時(shí)候發(fā)揮作用,此時(shí)變速箱的一軸和二軸之間存在轉(zhuǎn)速差,必須將發(fā)動(dòng)機(jī)的動(dòng)力與一軸切開以后,同步器才能很好的將一軸的轉(zhuǎn)速保持與二軸同步,擋位掛進(jìn)以后,再通過離合器將一軸與發(fā)動(dòng)機(jī)動(dòng)力結(jié)合,使動(dòng)力繼續(xù)得以傳輸。一個(gè)完整的匯編語言源程序通常由若干個(gè)邏輯段(segment)組成,包括數(shù)據(jù)段、附加段、堆棧段和代碼段,它們分別映射到存儲(chǔ)器中的物理段上。在設(shè)計(jì)中我用了單片機(jī)編程的程序形式,進(jìn)行程序設(shè)計(jì),同時(shí)從多篇論文及設(shè)計(jì)中整合而成。
在離合器的各個(gè)配件中,壓盤彈簧的強(qiáng)度,摩擦片的摩擦系數(shù),離合器直徑,摩擦片位置以及離合器數(shù)目就是決定離合器性能的關(guān)鍵因素,彈簧的剛度越大,摩擦片的摩擦系數(shù)越高,離合器的直徑越大,離合器性能也就越好。實(shí)驗(yàn)室設(shè)備中除了離合器的模型,還有其它很多特種機(jī)械模型,只有充分了解了離合器,才能對駕駛更有幫助。程序設(shè)計(jì)設(shè)計(jì)部分:該程序主要用于實(shí)現(xiàn)單片機(jī)與PC機(jī)的通信功能。從而能夠使單片機(jī)與PC機(jī)之間實(shí)現(xiàn)數(shù)據(jù)的互相交換。該程序運(yùn)用匯編語言進(jìn)行編寫。
三自由度平臺(tái)的用途
三自由平臺(tái)根據(jù)用途可分為兩大類:一類、模擬仿真用的動(dòng)感平臺(tái),二類、精密定位測試用的平臺(tái)
一類、模擬仿真用的動(dòng)感平臺(tái)
模擬仿真用的動(dòng)感平臺(tái)的有效載荷范圍為0.25噸-20噸,這些模擬仿真動(dòng)感平臺(tái)通過接受來自上位控制器的狀態(tài)信號,控制平臺(tái)的運(yùn)動(dòng),廣泛應(yīng)用于各種訓(xùn)練模擬器如飛行操縱模擬器、艦艇操縱模擬器、直升機(jī)操縱模擬器、坦克操縱模擬器、汽車駕駛模擬器、火車駕駛模擬器、地震模擬器以及動(dòng)感影院、娛樂設(shè)備等領(lǐng)域。
二類、精密定位測試用的平臺(tái)
精密定位測試用的三自由度平臺(tái)的有效載荷范圍為0.5噸-50噸,位置定位精度達(dá)到0.02mm。廣泛應(yīng)用于各種汽車姿態(tài)測試設(shè)備、飛機(jī)/導(dǎo)彈等飛行器的飛行姿態(tài)測試設(shè)備,以及空間宇宙飛船的對接,空中加油機(jī)的加油對接。同時(shí)利用三自由度精密定位機(jī)構(gòu),可以做成高剛度、高精度的三自由度加工機(jī)械和裝配機(jī)械手(如三軸并聯(lián)機(jī)床和并聯(lián)機(jī)器人,廣泛應(yīng)用于各種復(fù)雜的特種加工、復(fù)雜裝配(如飛機(jī)裝配和衛(wèi)星的裝配)。
三自由度平臺(tái)算法
平面自由度計(jì)算公式F=3n-(2p+3q),n為自由構(gòu)件數(shù)目(不含支架),p為低副數(shù),q為高副數(shù)目。
1、空間坐標(biāo)為:X-Y-Z
2、若在空間坐標(biāo)原點(diǎn)有一個(gè)物體,則:這個(gè)物體首先可以沿X軸、Y軸、Z軸移動(dòng),這就有三個(gè)自由度
3、同時(shí),這個(gè)物體還可以繞X軸、Y軸、Z軸轉(zhuǎn)動(dòng),這又是三個(gè)自由度
4、上述就是空間物體的三個(gè)自由度
5、若排除Z向德自由度,那就只有平面的自由度了,但是,這樣的自由度有四個(gè),即:X軸、Y軸德移動(dòng)、沿X軸、Y軸的轉(zhuǎn)動(dòng)
當(dāng)一個(gè)物體要做一維運(yùn)動(dòng),如X向德移動(dòng),可以將這個(gè)物體安裝在一個(gè)由絲桿驅(qū)動(dòng)、并沿著精密導(dǎo)軌座滑動(dòng)單元的構(gòu)件上,當(dāng)電機(jī)驅(qū)動(dòng)絲桿旋轉(zhuǎn)的時(shí)候,將帶動(dòng)這個(gè)物體沿X向運(yùn)動(dòng),這是一維運(yùn)動(dòng)
若是想讓這個(gè)物體能夠做二維運(yùn)動(dòng)怎么辦呢?那就將上述的一維運(yùn)動(dòng)機(jī)構(gòu)(包含要運(yùn)動(dòng)的物體)一起安裝在另外一個(gè)一維運(yùn)動(dòng)的機(jī)構(gòu)上,并與上面的一維運(yùn)動(dòng)機(jī)構(gòu)互成90°安裝,這樣,這個(gè)最上面的物體就可以實(shí)現(xiàn)二維運(yùn)動(dòng)了。





 在線咨詢
在線咨詢 




